|
3-DOF
Motion Platform Power Calculator Model & Software |
|
 |
|
Download
.zip
package here
(Requires BFF Motion
Driver v2.4 or later. Install the calculator
software in its own directory - not in the motion
driver directory. Will run with demo driver.) |
ADDED - June '09
- Actuator Power Calculator
I've been asked many times for help by builders
trying to work out how big drive motors need to be for their DIY motion
platforms - and haven't really been able to give a good answer
because of the complexity of the problem and the time it takes
to do the calculations properly. I've written a small piece
of software which might help (or simply serve to confuse
further?) as an add-on to the BFF Motion Driver. It provides
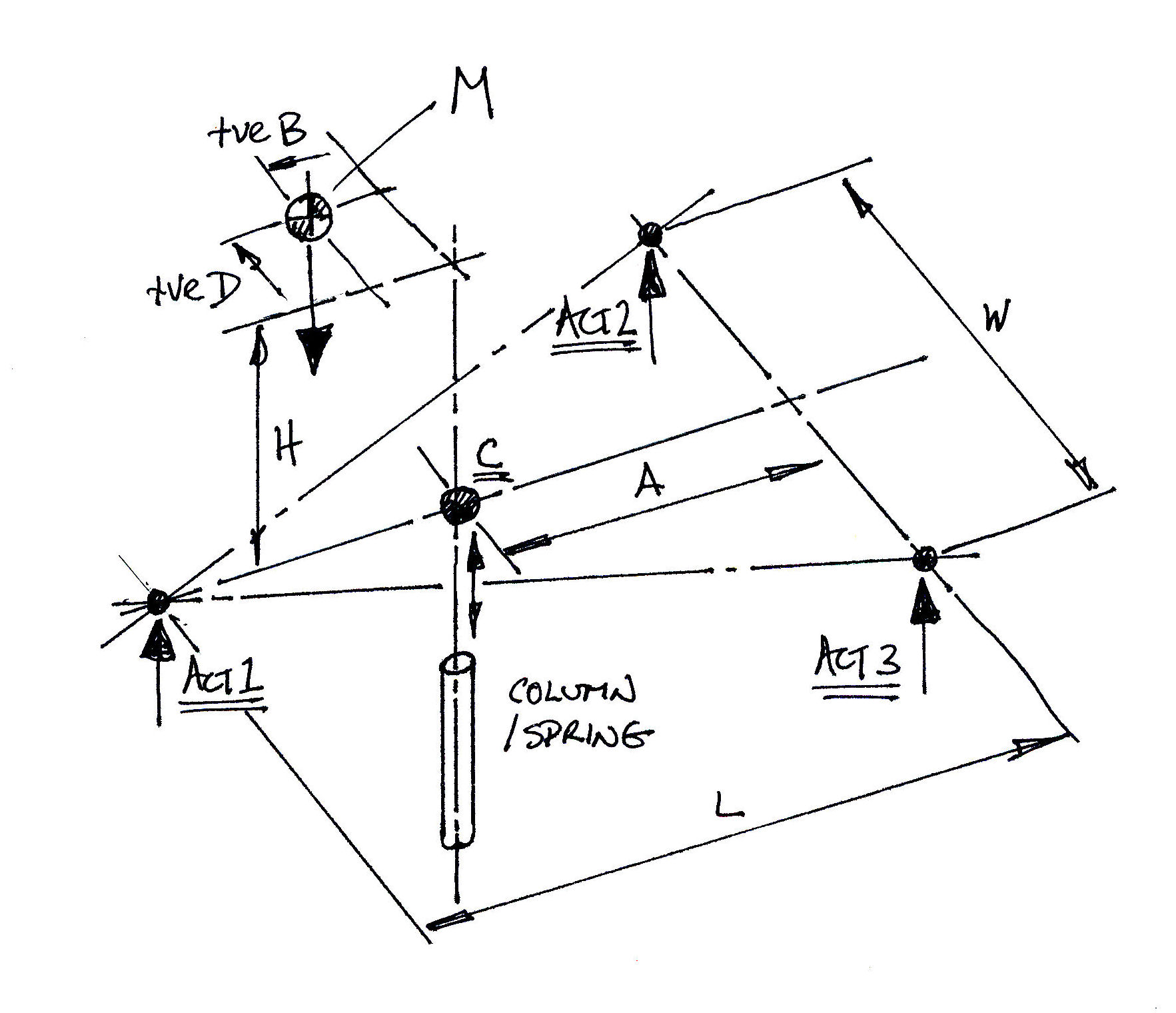
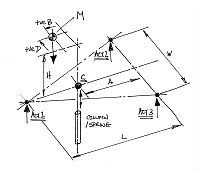
power estimates for conventional 2 or 3 DOF motion platform
types - those with 2 or 3 actuators below the platform and a
central column/spring.
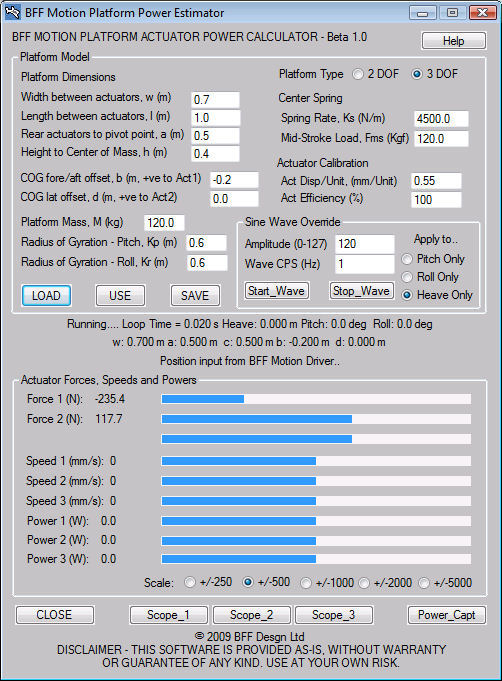
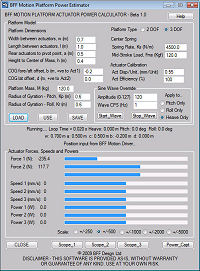
The software runs a real-time simulation of the
defined motion platform to which it applies drive actuator
displacements to generate platform velocities and accelerations.
From these the equations of motion are solved to calculate
actuator forces and from these powers can be determined. The
actuator displacements come from either the "live" outputs from
the BFF Motion Driver (running in Mode=MEM config) or from sine
wave displacements generated internally by the power calculator
software.
In both cases the BFF Motion Driver v2.4 (or
later)software must
be running on the PC. The calculator will operate with locked
versions of the motion driver, but it will stop when the
Driver's demo time elapses.
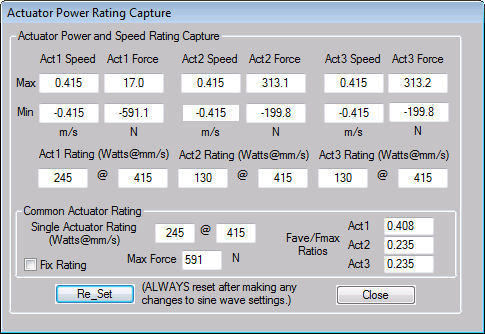
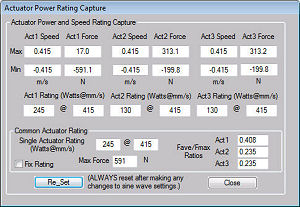
The estimated required power ratings of drive motors are
obtained by capturing the maximum actuator force and speed
events that occur across all actuators during the period of
motion.
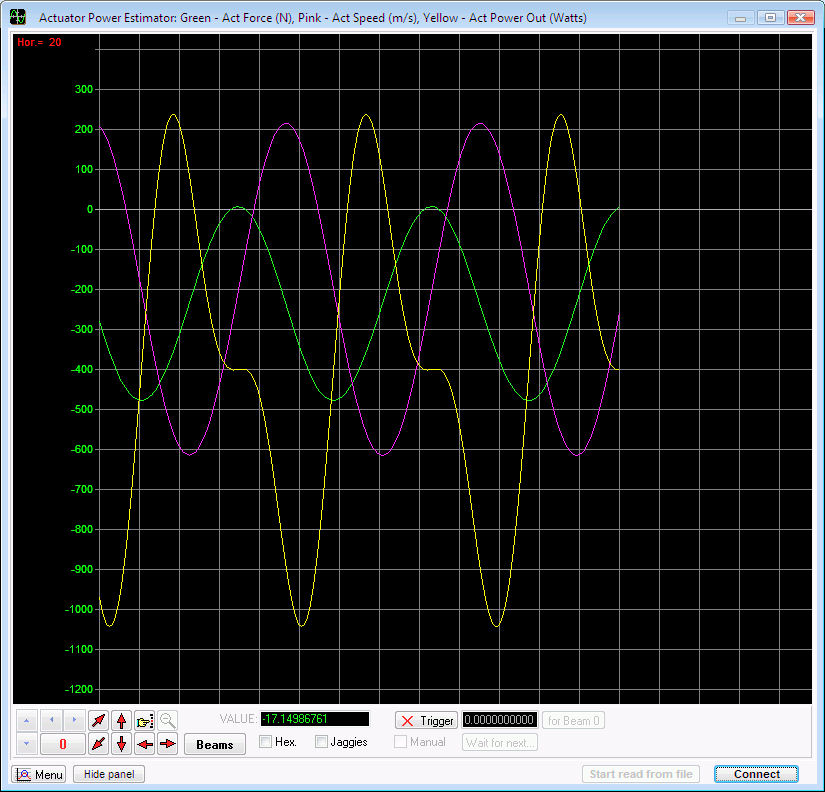
The Power Calculator can be used to experiment
with different platform dimensions, loads and states of
imbalance. The sine wave actuator displacements can be applied
to different DOF's, eg to heave only or to pitch only, and with
different amplitudes and frequencies to let you see the effects
on actuator forces, speeds and power of different regular wave motions. The
idealised actuator duty arising from actual flights and motion
driver configurations can be looked into. It is also possible to
use the Power Calculator to inspect static actuator loads by
manually adjusting the actuator displacements using the "Manual
Override" feature of the Motion Driver.
 The
most useful way I've found of using the software is to run the
platform model with a fairly demanding sine wave motion input to
assess power requirements and then to check those ratings
against the duty arising from simulated flights in bad weather
or in which sharp manoeuvres are made. It is also fascinating to
watch the effect of moving the platform out of load balance by
shifting the COG away from the pivot point - the actuator
loadings increase substantially and the power requirements can
rise sharply.
The
most useful way I've found of using the software is to run the
platform model with a fairly demanding sine wave motion input to
assess power requirements and then to check those ratings
against the duty arising from simulated flights in bad weather
or in which sharp manoeuvres are made. It is also fascinating to
watch the effect of moving the platform out of load balance by
shifting the COG away from the pivot point - the actuator
loadings increase substantially and the power requirements can
rise sharply.
IMPORTANT
 It
is IMPORTANT to note that the software is at a beta state and
may have bugs. Note also that the results should be used as
design ESTIMATES and should not be used as the basis for design
decisions without independent benchmarking by other means. The
mathematical model used is a bit more sophisticated than the
usual long-hand calculations but it is still a simplification of
the real physical system. The
numerical methods used in the simulation also will introduce the
odd glitch or spike into the force results and will reduce the
accuracy of the results at higher frequency motions -
accelerations in motions faster than roughly 4-5Hz will not be
calculated reliably due to the refresh speeds of the motion driver and the
calculator software. This means that calculated power
requirements for vibration type motions will not be reliable.
It
is IMPORTANT to note that the software is at a beta state and
may have bugs. Note also that the results should be used as
design ESTIMATES and should not be used as the basis for design
decisions without independent benchmarking by other means. The
mathematical model used is a bit more sophisticated than the
usual long-hand calculations but it is still a simplification of
the real physical system. The
numerical methods used in the simulation also will introduce the
odd glitch or spike into the force results and will reduce the
accuracy of the results at higher frequency motions -
accelerations in motions faster than roughly 4-5Hz will not be
calculated reliably due to the refresh speeds of the motion driver and the
calculator software. This means that calculated power
requirements for vibration type motions will not be reliable.
The results accuracy will also reduce with larger
pitch and roll angles - the model is intended for platforms with
"normal" ranges of pitch and roll movement - say up to about +/-
45 degrees.
If you want to use the software please read the
User Manual carefully before doing so and use the results
intelligently. Please report any bugs you might find.
DISCLAIMER - THE SOFTWARE IS PROVIDED AS-IS,
WITHOUT WARRANTY OR GUARANTEE OF ANY KIND - USE AT YOUR OWN
RISK.
© This site is
copyrighted, If you'd like more information or have any
comments please contact me at