Using Dimension Engineering Sabertooth
and SyRen Motor Controllers
UPDATE March 2015: Although some of
the documentation below refers to the now retired 40SPU-1
card the connections between the Sabtertooth/Syren
controllers and the new 64SPU-2 card are the same.
UPDATE Jan 2014: V2.80 of the
motion driver software (FS9/X version) adds a direct
interface for
Dimension Engineering's Kangaroo motion control modules.
See Section 18 of the
on-line user guide for more detail.... This can now be used
to build your motion platform drive using Syren or
Sabertooth controllers of all sizes without use of the
64SPU-2 and related hardware.
|

Left to right
- ST 2x25, SyRen 25 & ST 2x50
Using
Sabertooth Controllers
with the BFF motion drive -
Quick Guide
|
Dimension Engineering supply a range of
widely available compact DC motor controllers for robotics
applications that look as if they may work well in a DIY
motion platform servo drive.
I've had a plan for some time to try and add
support for these controllers to the BFF Motion Driver
software and servo drive hardware and have finally got
around to doing it.
The DE controllers I've looked at here are
the Sabertooth and SyRen models. The Sabertooths are
two-channel units with continuous ratings of 25 and 50 amps
(2x25 & 2x50), the SyRen 25 is a single channel controller,
again with a current rating of 25 amps. Whereas the 25 amp
models are limited to a 24V operating voltage the fan cooled
2x50 unit can handle higher voltages - up to 48V, which
together with its 100amp peak rating makes for a fairly high
power controller that might be useful in drives for heavier
motion platforms. More recently the Sabertooth 2x60 has been
introduced which covers up to 60 Amps per channel.
|

Sabertooth
2x50 |
The controllers all use the same set of
Packetised serial commands and can be combined on the same
TTL serial line to provide multi-channel drives. For smaller
3 DOF platforms 3 x SyRen 25's could be combined, or 1 x Sabertooth 2x25 and 1 x SyRen 25 to give control for 3 x 24V
DC drive motors. In heavier platforms 2 x Sabertooth 2x50's
could be used (with one channel spare in a 3 DOF drive,
perhaps to add a yaw DOF later!).
My initial approach to configuring a system
using these controllers was to attempt to drive them
directly from the 64SPU-2 signal processor card - just as
the
Devantech MD03's are currently driven. Although this
proved technically possible I wasn't quite happy enough with the
controllability during start-up or shut-down operations, or
with the data refresh rates I was getting with the set up
(mainly limited by my microcontroller). In the end
I decided that the most secure and fastest way of
instructing the controllers was directly from the PC - the
BFF PID Servo Controller software sends its motor speed and
direction demands directly to the Sabertooth/SyRens through
a
USB to RS232 TTL level converter cable. The system wiring
I experimented with is shown below.
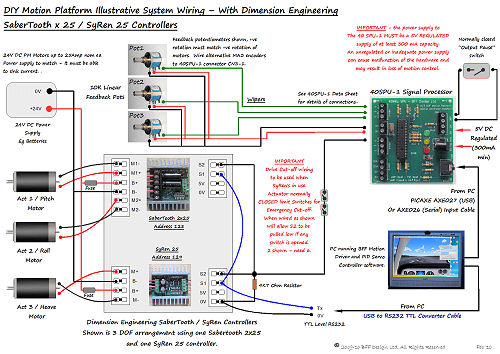
NOTE the above wiring diagrams show the older
40SPU-1 signal processor card. The controller-side wiring to the new 64SPU-2
card is very similar - see the 64SPU-2 data sheet for
details of the Syren high/low drive enable connection.
Each controller is configured for Mode 4 -
Packetised Serial input and each is given a different
address on the serial line. The serial input required is TTL
level true (non-inverted) RS232 and this is probably most
conveniently provided using a
USB/TTL converter cable such
as this. The 64SPU-2 signal processor card is still required
in the system to provide the position feedback and to
provide a safety stop signal for the SyRens if they are used
- the Sabertooths have built-in serial timeouts and will
automatically stop driving if the comms with the PC are
lost, but the SyRen's don't.
|

Wiring for Sabertooth
only systems |
All the DE controllers mentioned have an
emergency stop provision by pulling their S2 connections to
a logic low state - this can be done by wiring to the
64SPU-2 and also combined with over travel limit switches to
provide the necessary safety cut-off in the drive system. If
you are only using Sabertooth controllers (no SyRens) then
the controllers' S2 connectors do not need to be connected
to the 64SPU-2 and can be wired directly through normally
open actuator over-travel limit switches to ground - see the
system wiring diagram for Sabertooth only controllers -
left.
RESULTS
I have had all three models running
unloaded motors with
the PID Servo Controller software and the
64SPU-2 and the servo system
appears to run smoothly and under control. I have also now
run my mini motion platform (3) with the Sabertooth
controllers for a short period of time without any obvious
problems. The controllers were able to drive the platform
under load with correct motion response and without signs of
distress. I
can get servo loop refresh rates of about 50 Hz which is
fine for the majority of motions seen in the DIY motion
platform. When running with FSX flight simulator best
results are achieved with the motion software running on a
LAN PC, although users with powerful multi-core machines
may get satisfactory performance with FSX and the motion drive on the same
PC.
Preliminary scoping of the logic connection
lines on the controllers suggests there is not a great deal
of electrical noise coming though to the logic connections
from the high current/voltage motor side.
The approach looks promising and it may suit
some builders better to use the Dimension Engineering
controllers rather than the Devantech MD03's if local prices
and availability are in their favour. Certainly the much
higher power capacity of the Sabertooth 2x50 has given me
some ideas about heavier platform drives.
The v2.6+ of the PID Servo
Controller available on the site now supports the Dimension
Engineering motor controllers.
© This site is
copyrighted, If you'd like more information or have any
comments please contact me at
