Previous
Contents
Next
 11.
Mix Settings 11.
Mix Settings
These
settings do not apply to independent (uncoupled) actuator output (Rig_Type=0).
In the
case of motion platforms with "coupled" 3-point support actuator
arrangements (Rig_Type=1) the M settings window is used to
set the proportion of the actuator movement range that each cue can
use.
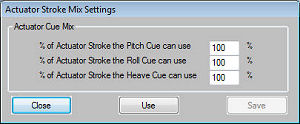
For
example if the mix proportions are all set to 100% then a maximum
pitch cue from the motion driver would utilise all of the available
actuator travel range. There would then be no more stroke available
if some roll or heave cue was required at the same time. The mix
settings can be adjusted to limit the amount of stroke the pitch cue
could use - so leaving some for the other cues if the pitch goes to
maximum.
What the
correct settings might be depends on your flying style. In
commercial aircraft flying you will not usually get maximum pitch
and roll conditions occurring at the same time. However you will
often get pitch and heave, or roll and heave occurring
simultaneously. Setting the pitch and roll utilisation to 75% and
the heave to 50% say would leave some heave capacity even when the
pitch or roll goes to a maximum. And when the there is no pitch or
roll there would still be reasonable stroke length available for the
more continuous heave motion.
 You
will probably need to experiment to obtain the mix settings that you
think are best suited for your platform and flying style. The
balance is between reserving enough stroke length for each DOF to
allow reasonable mixing of cues to take place, and in not reserving
so much stroke length that the available motion capacity goes
largely unused most of the time. You
will probably need to experiment to obtain the mix settings that you
think are best suited for your platform and flying style. The
balance is between reserving enough stroke length for each DOF to
allow reasonable mixing of cues to take place, and in not reserving
so much stroke length that the available motion capacity goes
largely unused most of the time.
Note that
whatever your settings the total cue output will always be capped at
the maximum stroke length of the actuators.
Use and Save
The changes you make
manually to settings or changes made by the wizard will not be made
active until the Use button is clicked. They will then be
made active in the current driver session, but will not be saved to
your .bff file. To save the changes to your file you must use the
Save button.
IMPORTANT – Take great care when making
changes to the cue settings as they can directly impact on the motion
range. It is recommended that the adjusted cue output is viewed in
the Virtual Oscilloscope and its stability assessed BEFORE the driver
is put back in Drive mode and the platform made active.
Previous
Contents
Next
|