V2 (3-DOF) User Guide - Contents
1. Introduction
2. Software Installation
3. Operation
4. Configuration File Settings
5. Data Output Formats
6. First Use Procedure
7. X-Plane Data Export
Settings
8. Pitch Cue Settings
9. Roll Cue Settings
10. Heave Cue Settings
11. Actuator Mix Settings
12. BFF PID Servo Controller
13.
Important Flight Motion Events - configuring
the motion driver
14.
Using Galil Controllers
15.
Using Dimension Engineering Sabertooth
Controllers
16.
Using Dyadic SCN5 Linear Actuators
17.
Using the BFF PID Servo Controller with
X-Sim
18.
Using Dimension Engineering Kangaroo
Controller Modules
19.
Touch-down bump and Engine start/stop shudder
generation
20.
Motion Driver for
rFactor
App 1. Change Log
Jan 2025 - The 3 DOF motion software is now FREE to
use for non-commercial projects, download and run the unlock key
generator app below, insert the required info (including the PC ID
generated by following the registration prompts in the motion
software), then click Generate and then Save - the app will create
and save a registration.ini file which you then copy to your motion
software folder. The unlock key will then be picked up automatically
when the motion software runs.
Unlock Key Generator App
Updated
13/10/16 - Condor_V2.61
PID Servo Controller
updated in all versions 23/3/15
Main software
Updated
26/9/14 -
rFactor_V2.83beta1
Updated
10/4/14 - MSFS_V2.83 ,
X-Plane V2.83
Previous Versions -
MSFS_V2.80 ,
Condor_V2.60 ,
X-Plane V2.622 and
Falcon 4 AF
V2.61
If any of the above are not working you can use
this DropBox folder for downloads -
DROPBOX
Older
PDF User Manual,
Motion Cue Settings Guide
Introduction
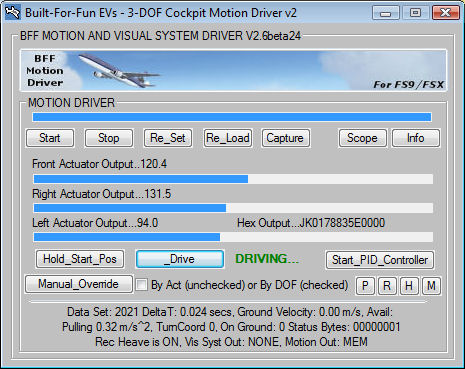
The BFF Motion Driver generates
real-time digital position demand signals to drive the
movements of a flight simulator motion platform.
V2 of the Motion Driver also
provides separate motion cues for articulated projector displays (as described
here).
The BFF motion driver works with Microsoft Flight Sims FS9 or FSX
(also Lockheed Martin� Prepar3D�), X-Plane 8.68 / 9.6,
Falcon F4 and Condor Soaring. Each
Sim has a separate motion driver .exe.
The motion driver can provide
cues for two general types of platforms.
-
2/3 DOF
platforms in which each movement axis is driven by a single
motor/actuator (independent cue outputs, Rig_Type=0).
-
2/3 DOF
platforms in which a triangle of support actuators move together
to drive all axes (coupled cue outputs, Rig_Type=1).
For both types one
of the 3 driver outputs can be left unused to drive 2 DOF platforms.
You must set the
correct Rig_Type parameter for your motion platform type in your .bff
configuration file. See Section 6 for other settings to be made
before you use the software for the first time. And see Section 4.
for details of other settings in the .bff configuration file.
IMPORTANT
The position
demand output from the motion driver can not be used to drive
electric motors directly. This requires motor speed and direction
commands, and normally requires separate closed loop
servo drive hardware/software. The BFF Motion Driver integrates
simply with the BFF PID Servo Controller software and 64SPU-1
hardware to implement a low cost closed loop servo drive. The PID Servo
Controller software is bundled with the motion driver. The 64SPU-1
and associated hardware is available on the
web site.
The motion driver
provides a range of output data modes which
allows its position demand outputs to be interfaced with other servo drive hardware.
v2.80 of the driver adds a Dimension Engineering
Kangaroo interface to allow drives to be
built using DE hardware alone.
PLATFORM TYPE
SETTINGS
The configuration settings for
the motion driver are held in an editable .bff configuration file selected when
the software is run. See Section 4 for the full range
of motion driver settings. The .bff configuration files are kept in the same
folder as the motion driver .exe.
Setting parameter Rig_Type=0 in
your
.bff configuration file configures the motion driver for "independent" outputs.
Setting the parameter Rig_Type=1 configures the motion driver
for "coupled" outputs.
NOTE For
coupled 3-point support
platforms Actuator 1 is the FORWARD actuator, Actuator 2 is the REAR
RIGHT actuator and the Actuator 3 is the REAR LEFT actuator. For "independent"
actuator platforms the three channels are pitch, roll and heave.
For 3 point support type rigs
with two forward actuators and a single rear actuator simply reverse
the pitch and roll cues in the configuration file using the reverse sense
parameters.
Previous
Contents
Next
|