V3
(6-DOF) User Guide - Contents V3
(6-DOF) User Guide - Contents
1. Introduction
2. Software Installation
3. Operation
4. Configuration File Settings
5. Data Output Formats
6. First Use Procedure
6B.
"Easy" Cue Settings Windows
7. X-Plane Data Export
Settings
8.
Using Dimension Engineering Kangaroo
Controller Modules
9.
Motion Driver for rFactor racing sim
10.
Motion Driver for Assetto
Corsa racing sim
11.
Motion Driver for F1 2013 ( & DiRT 3/4) racing sims
12.
Motion Driver for Live for Speed racing sim
13.
Motion Driver for iRacing racing sim
14.
Using the Generic Motion Driver
15.
Motion Driver for GPBikes motorcycle racing sim
16.
Motion Driver for Project CARS racing sim
17.
Motion Driver for Aerowinx Precision
Simulator (PSX)
18.
Actuator Angle Monitoring
19.
Using the x-IMU Inertial Measurement Unit with
the Generic Motion Driver
20.
Motion Driver for Digital Combat Simulator (DCS)
Appendix 1. Change Log
IMPORTANT Update 24/8/21 - THE 6DOF MOTION
SOFTWARE IS NOW FREE TO USE FOR NON-COMMERCIAL PERSONAL USE.
USE THE KEY GENERATOR APP BELOW TO CREATE AN UNLOCK
KEY FOR YOUR PC. THE APP USES THE PC ID GENERATED BY THE MOTION
SOFTWARE WHEN YOU RUN IT - FOLLOW THE REGISTRATION PROMPTS.
https://www.dropbox.com/s/z3po6zb1wkwi48c/6DOF_unlock_key_generator_home_use.zip?dl=0
Updated 6/12/23 Corrected DCS version (LUA snippets
now match exe) -
DCS V3.420
Updated 4/12/20 -
MSFS/X-Plane V3.502 -
Generic V3.501 -
F1 2013 V3.421
Background Fast Curve Fitting
App V1.21
Direct Software
Downloads - Updated 17/12/18 -
Background Fast Curve Fitting
App V1.02
For Thanos'
"actuator kick" firmware fix (new serial packet ID's)
Updated 28/9/18 -
Background Fast Curve Fitting App V1.01
For Thanos'
"actuator kick" firmware fix (new serial packet ID's)
Updated 16/8/18 -
GPBikes_V3.420
(for GP Bikes Beta 14)
Updated 20/7/17 -
F1_2013/DiRT V3.414
Updated 27/4/17 -
DCS_V3.414
Updated 23/11/16 -
F1_2013/DiRT V3.413
Updated 18/11/16 -
DCS_V3.413
Updated 16/5/16 -
Generic_V3.411
(added x-IMU interface App)
Updated 15/4/16 -
MSFS_V3.411
- X-Plane V3.411 -
Aerowinx PSX V3.411
rFactor V3.411
- Assetto Corsa
V3.411
- LFS V3.411 -
iRacing V3.411
- Generic_V3.411
- Project_CARS_V3.411
- F1_2013/DiRT V3.411 -
GPBikes_V3.411
Updated 8/12/15 -
MSFS_V3.406
- X-Plane V3.406 -
Aerowinx PSX V3.406
rFactor V3.406
- Assetto Corsa
V3.406
- LFS V3.406 -
iRacing V3.406
- Generic_V3.406
- Project_CARS_V3.406
- F1_2013/DiRT V3.406 -
GPBikes_V3.406
Updated
31/1/13 - Condor_V3.0Beta9.1
If any of the above are not working you can use
this DropBox folder for downloads -
DROPBOX
Introduction
The BFF Motion Driver generates
real-time digital position demand signals to drive the
movements of a flight (or racing) simulator motion platform. V3 of the Motion Driver
generates motion cues for 6 degrees of freedom (6 DOF) hexapod (Stewart) type
platforms.
The V3 motion driver works with
Microsoft Flight Sims FS9/X, X-Plane v9.5+, Aerowinx PSX and Condor Soaring. Beta versions are
also available for rFactor, Assetto Corsa, F1 2013, Live for Speed and iRacing racing sims
plus others. Each Sim has a separate motion driver .exe.
A "Generic" version is also available which is not related to any specific
flight or racing sim but can be driven by vehicle motion data sent by UDP.
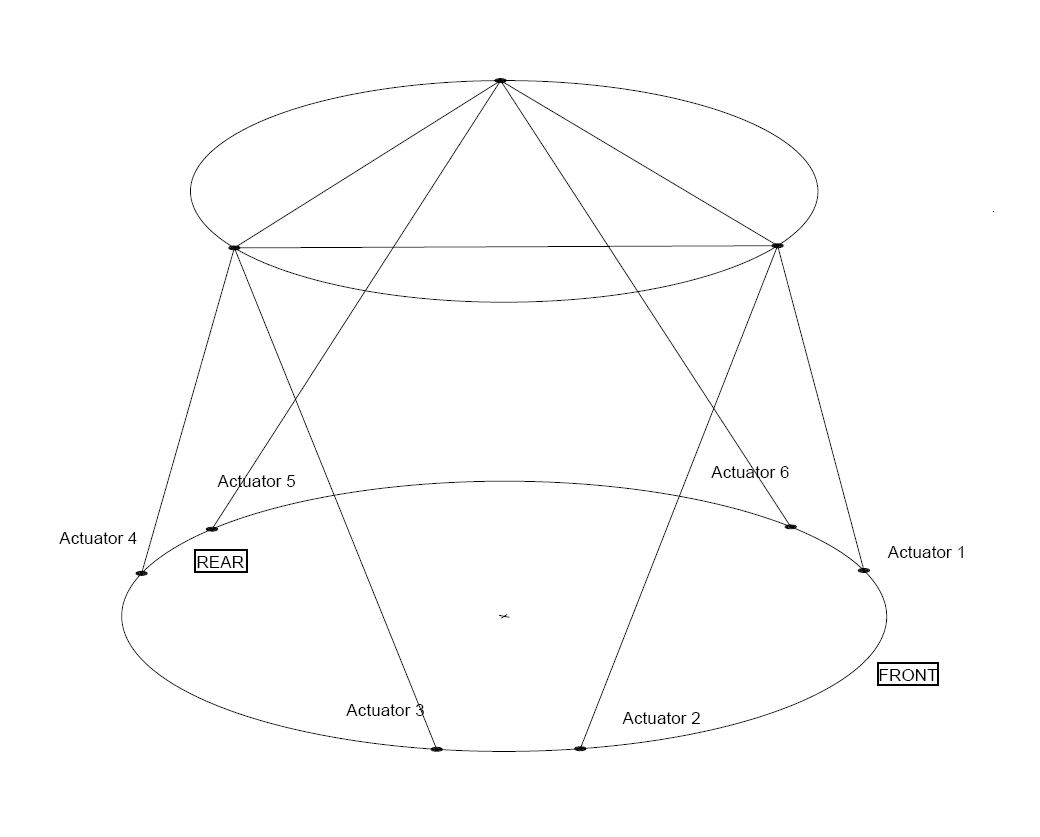
The motion driver
assumes all six platform actuators are identical in stroke length
and position feedback calibration. The position feedback should be +ve
for upwards heave of the platform. The actuator numbering is as
shown in the figure below. Actuators 1/2, 3/4 and 5/6 form the three
pairs. To work with platforms with reversed fore/aft and lateral
directions simply reverse
the pitch, surge, roll and sway cues in the .bff configuration file using the reverse sense
parameters (see the M settings window).
The actuator working
ranges are defined in the config file using a scale of 0-255 and the position demand
for each actuator is output as a value within the 0-255 range (for
8bit output formats). Higher resolution outputs are also available. The
real physical geometry of the platform actuator arrangement is
defined in the .bff configuration file - see
section 4 for more details. This physical model is used
internally by the motion driver to relate output DOF movements to
individual actuator extensions.
IMPORTANT
The position
demand output from the motion driver can not be used to drive
electric motors directly. This requires speed and direction
demand outputs. This normally requires separate closed loop
servo drive hardware/software.
Previous
Contents
Next
|