UPDATE Oct 2011 - The Mini Motion
Platform plans are now also available as part of the
Full Download Plans Set
available from the plans order page.
UPDATE 13th Feb 09 - Detailed
plans are now available for the Mini Motion Platform. They
are bundled FREE with orders for the
V2 Motion Driver software.
I think this mini-motion platform is probably my
favourite of the three I've built so far. The design draws on lessons
learned from the previous two builds and with it I've tried to
strike a balance between having enough motion to add real
enhancement to the sim experience whilst keeping the structural
complexity of the machine as low as possible. Keeping things
simple keeps the build cost down, makes it easier to build and
easier to maintain.
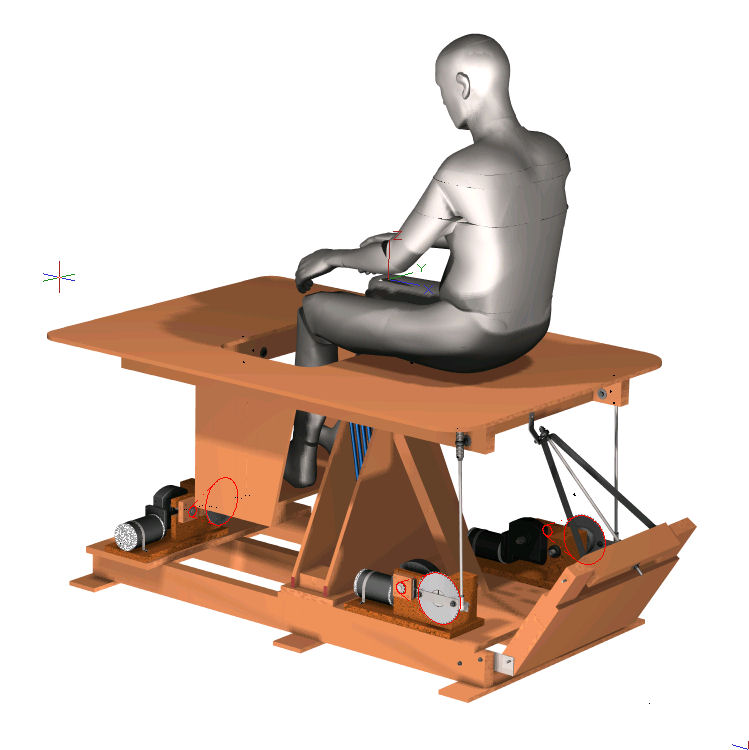
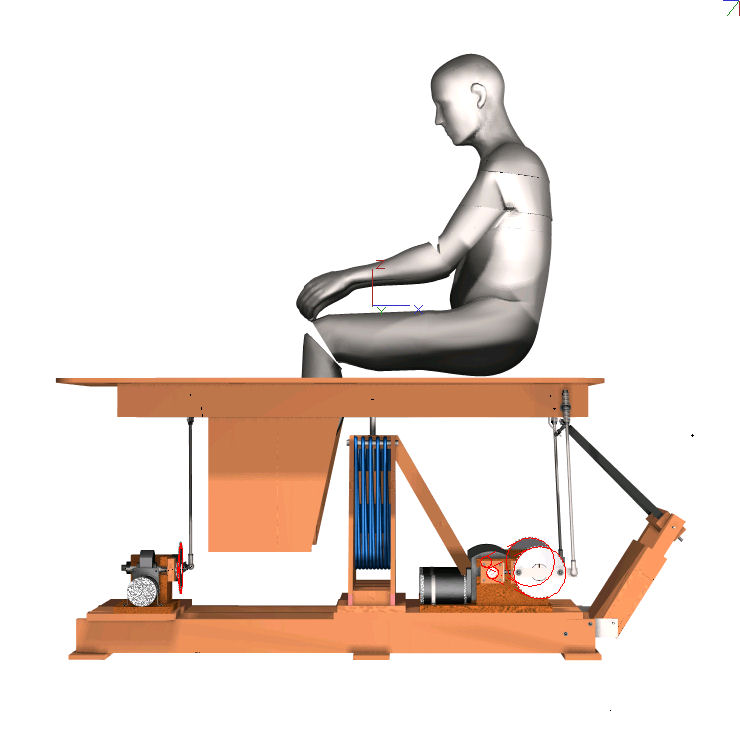
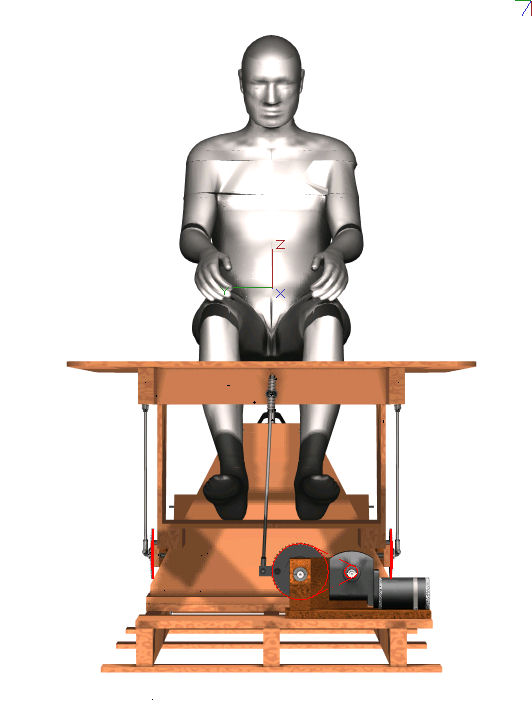
The platform is a 3 degree-of-freedom
small-displacement machine, it is a single seater and is small
enough to fit in the corner of my room. It is based on a fairly
conventional 3-point support type rig with a central sprung
support and stabilising column.
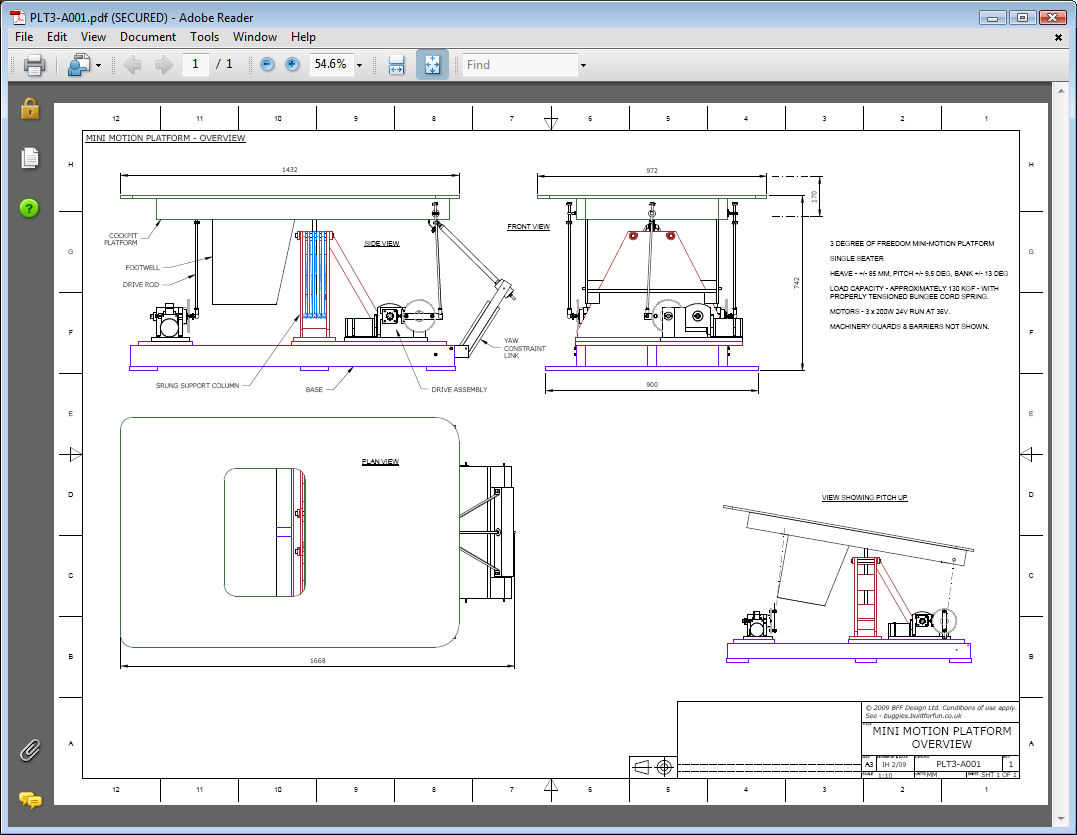
I thought quite hard about the motion range needed
for the platform to still make it worth building and it has +/-
9° pitch, +/- 13° roll and about +/- 85mm heave. These are a
good deal less than the movement capacities of the other
platforms on the site however when used with a visually enclosed
cockpit I believe they are sufficient to add a real sense of
motion to the flight sim, but to do it at as low a cost as
possible.
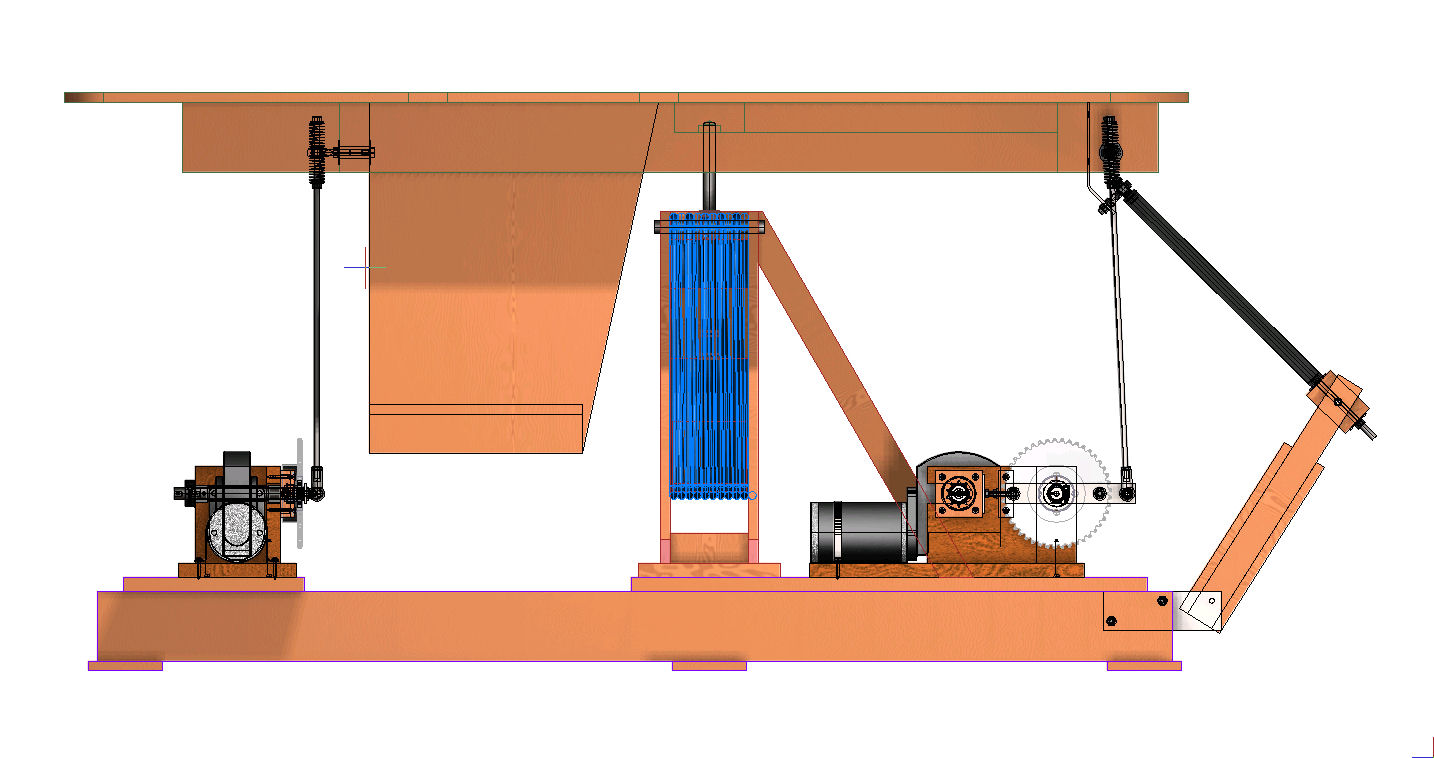
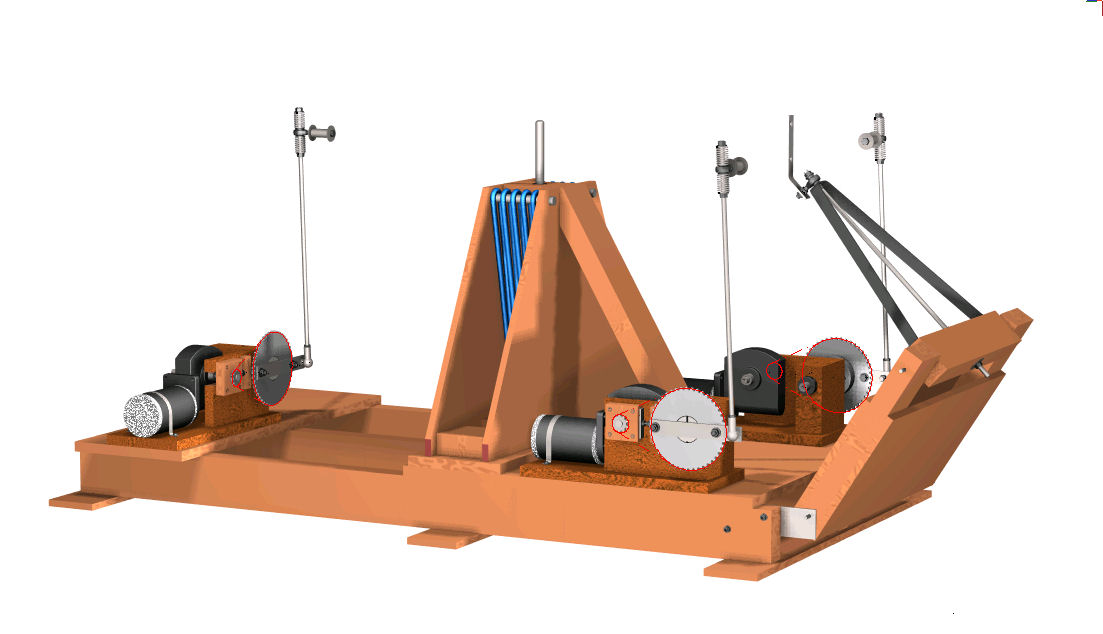
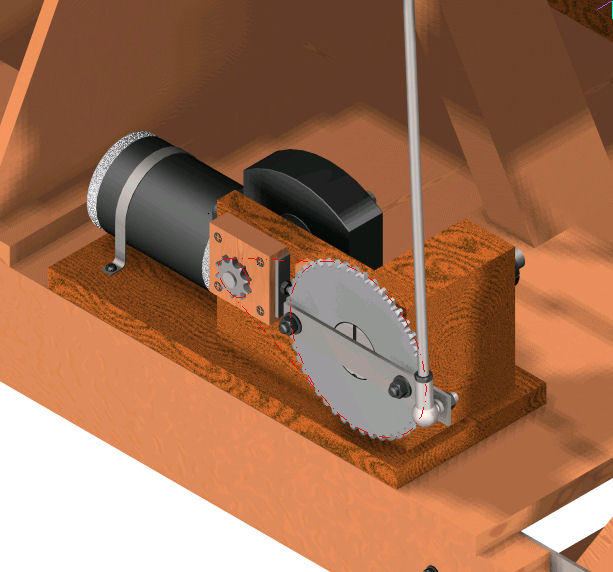
The platform is driven by 3 x 200W electric motors
each through worm gearing and a single roller chain reduction
stage. The final drive sprockets carry the crank arms to which
the three drive rods are attached and so rotation of the cranks
drives the pitch, roll and heave movement of the platform. The
majority of the platform weight is carried by the central
plunger type bungee cord spring. The spring column and the rear
mounted partial Sarrus linkage constrain horizontal linear
movement and yaw rotation of the platform. The majority of the
construction is in timber and the more heavily loaded machine
elements are in steel. Rolling element bearings are used in the
drives and linear ball bushings are used to constrain and guide
the motion of the bungee plunger spring. I've stiffened up the
structure in places as a result of seeing the prototype
machine's behaviour.
Here's a short movie clip of the prototype
running .... Platform 3 Clip,
(note that the CAD design shown has a bigger
motion range than this prototype platform,
there is the odd squeak and click due to lack of
lubrication in places)
The platform is driven using the motion drive
software and single chip SPU servo hardware described on the
site. I have used a 36V battery supply to drive the nominally
24V drive motors to generate better speed and load capability -
even with this the MD03 speed controllers and the drive motors
show little signs of heating in use indicating low current
draws. I think the drive gearing has given the drives good force
capability which is a good sign for when I want to add a heavier
cockpit.
IMPORTANT NOTE - the Chinese made 200 W electric
motors I used in the build have become difficult to source. You
will probably have to find alternative motors if you wish to
build a similar platform, if so some speed and torque figures
for the actuator crank arm might help - on my platform the
torque at the crank arm is 42 Nm at the motor rated torque
output and the max speed of the crank arm is 68 rpm.
Above are a couple of photos of the prototype
build. I fitted a simple fabric covered hood as a temporary test
arrangement to enclose the
cockpit and used a projector to display the main front view from
over the pilot's head. An LCD display is used to display the
instrument panel. I think the performance of the platform is
surprisingly good. The heave movement is sufficient to provide
touchdown-bump effects, take-off motion, turbulence motion and
general in-flight heave effects. The pitch motion is sufficient
(with well tuned software setup) to allow me to feel
acceleration and braking forces both on the ground and in the
air and to induce a sense of pitch rotation, and the roll motion
is good for roll rotations and lateral acceleration force cues.
The rig will not have you "hanging in your harness" on heavy
decelerations but for GA type flying I like it as it appeals to
my preference for simming with as much realism as possible in
the flight conditions.
I haven't tried tuning the motion for fast jets yet
- I'll get round to it and see what it feels like.
PLANS
Detailed plans are available for the Mini Motion
Platform. They are bundled FREE with orders for the V2
Motion Driver software,
AND they are now also included in the
Full Download Plans Set
available from the plans order page.
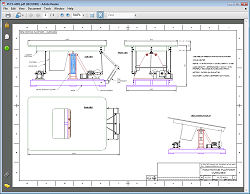
The plans consist of 13 A3 sheets covering the
detailed mechanical parts and assemblies of the platform. For
the control system hardware and software see the relevant web
pages.
I've added a few more CAD renderings of the design
below - click on an image to get a bigger view.
© This site is
copyrighted, If you'd like more information or have any
comments please contact me at