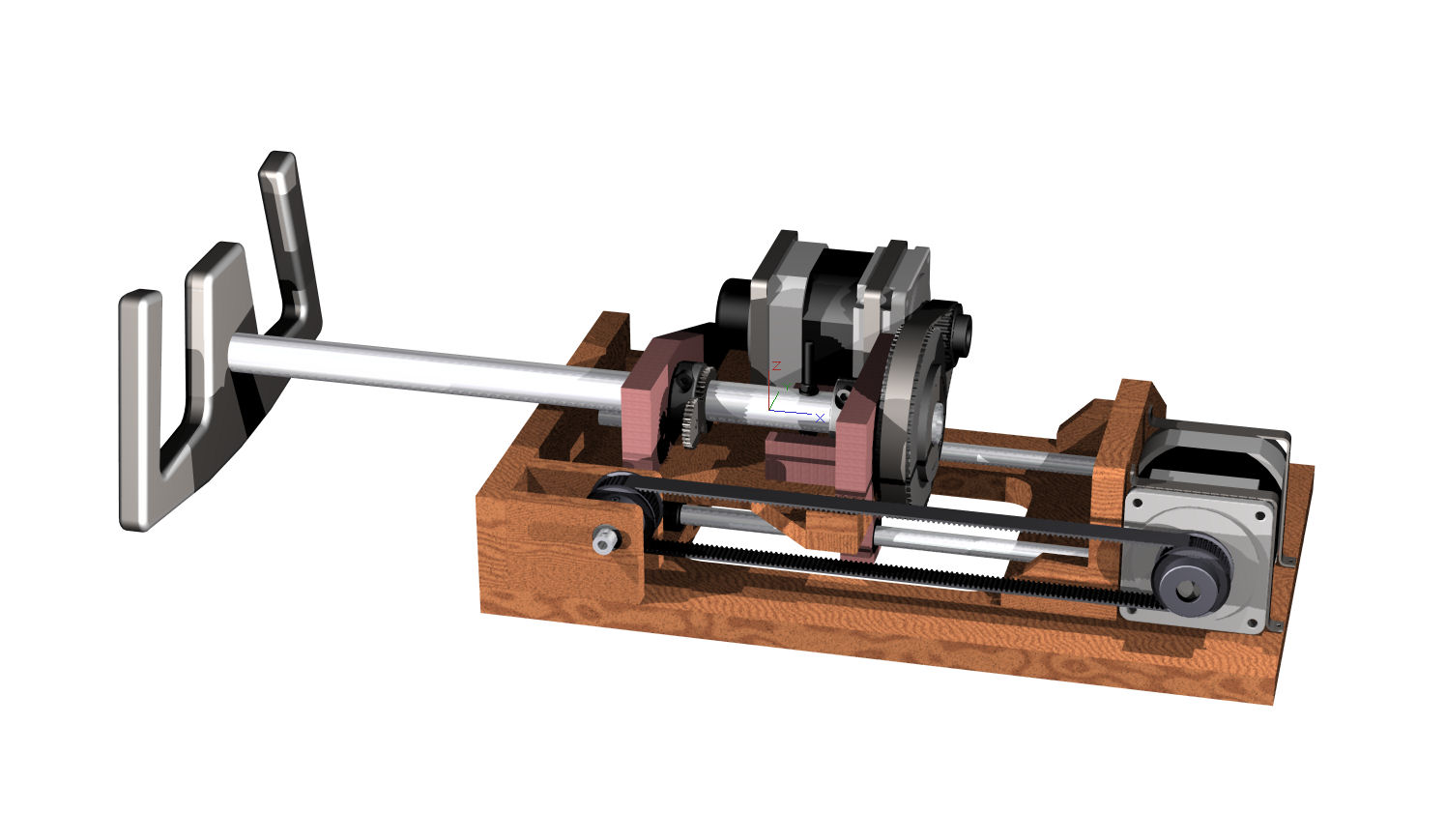
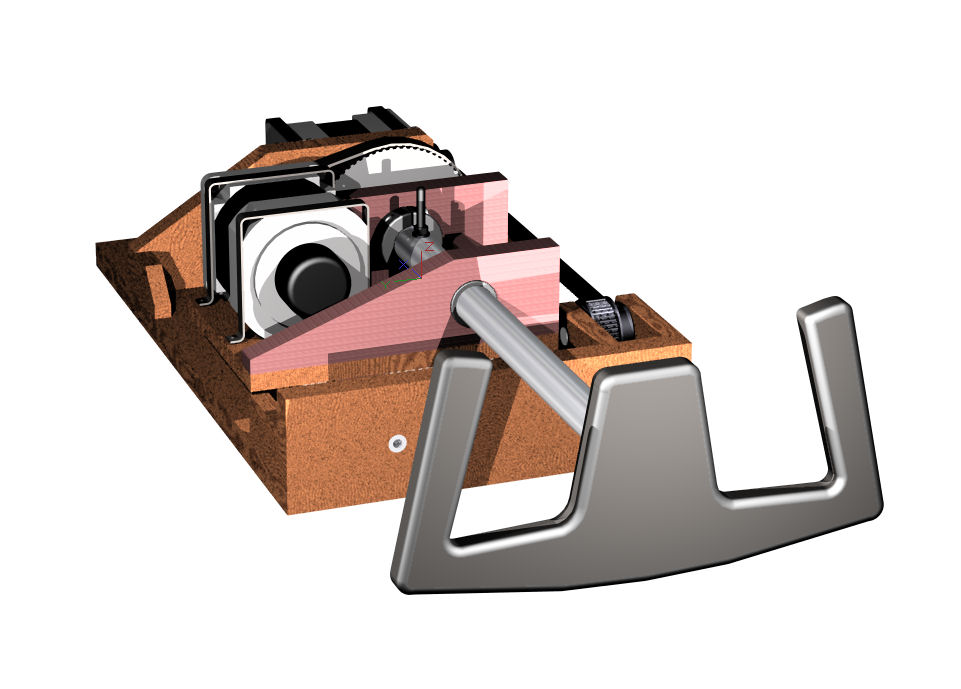
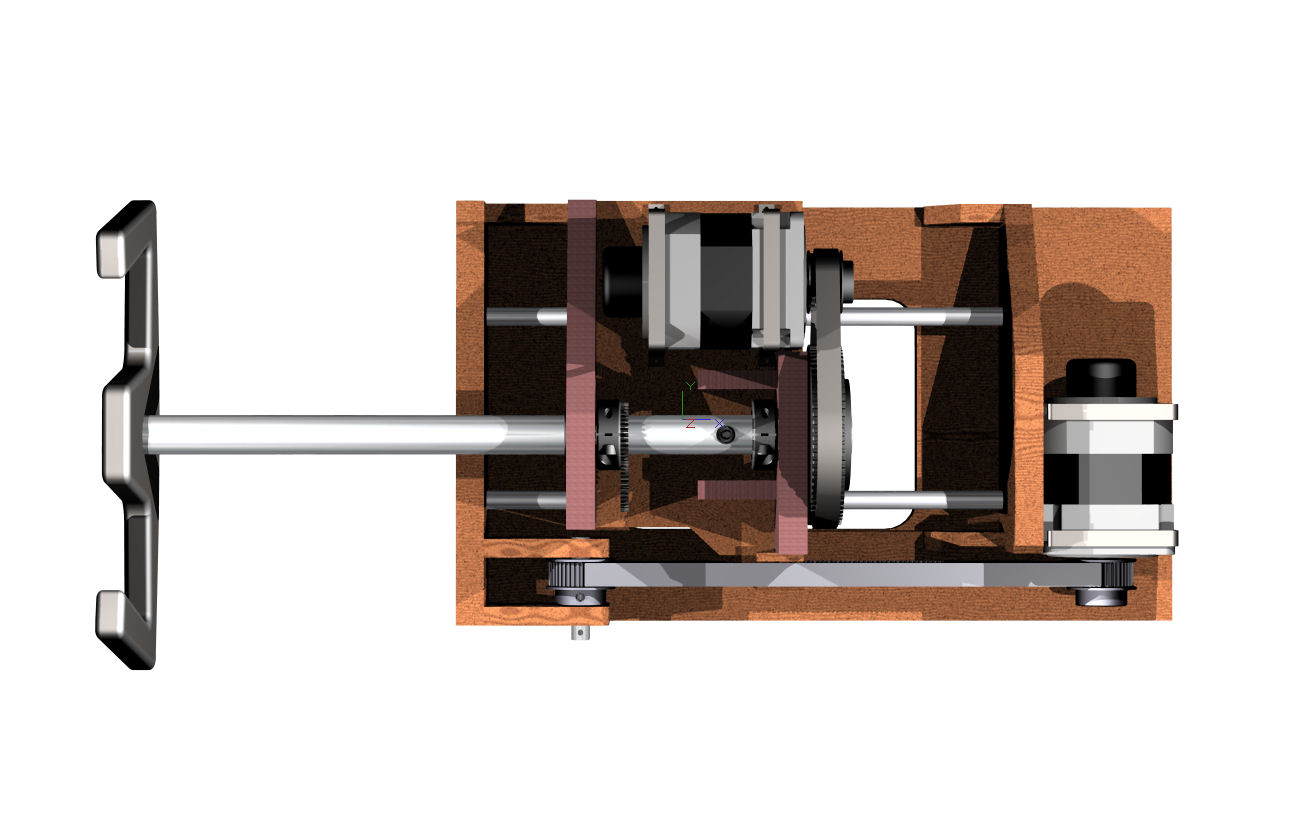
The yoke construction is fairly simple in
principal - but needs to be built accurately. The aileron drive motor, wheel tube and control
wheel (not included) are mounted on a travelling carriage, which itself is
mounted on low friction linear guides and linear ball bushings. The
control wheel tube is mounted in needle roller bearings on
the carriage. The
carriage is driven by the elevator motor via a toothed belt
loop. The elevator motor is mounted on the base structure of
the yoke at the rear.
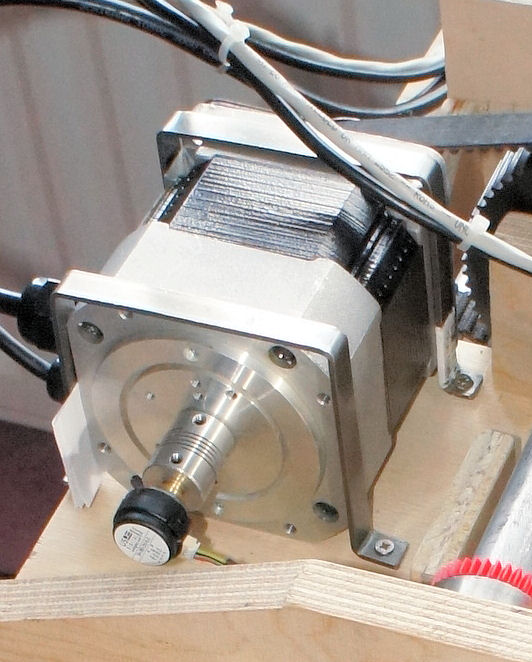
Each movement axis is loaded by a
single 3 phase BLDC motor (fitted with 360 cpr quadrature
encoder). The motors are specified in the drawings. An
important characteristic is their sinusoidal
back EMF which enables
very smooth response to the sinusoidal commutation voltages from
the purpose designed BFF BLDRV3 drivers.
|

BLDC motors - used
with specialised controllers.. |
The BLDC motors are sized
to allow simple toothed belt torque
transmissions to be used whilst still providing good levels of force
output. These belt drives are easier to build than spur
gearing and are fairly tolerant of slight misalignments and
positioning errors likely to be found in DIY constructions.
The force levels are such that
at the higher levels
one handed
operation of the yoke becomes quite uncomfortable quite
quickly if the control is displaced or untrimmed. The yoke needs to be
secured to a fixed base otherwise it
will move under the generated loading. At full load with 24V
supply the elevator loading is about 9 kgf (20 lbs), one
handed aileron operation at full load requires about 4.25 kgf
(9 lbs). These forces are typically with the controls fully
displaced during a flight manoeuvre, force levels during normal flying conditions are
much lower than this off course.
Provision is made for fitting potentiometers to report
the control position.
NOTE the plans do NOT include details of the
control wheel - builders must source their own. The hollow
yoke tube shown in the design is 25mm outside diameter.
Wiring for any buttons on the wheel can be routed through
the yoke tube.
A number of videos clips of the prototype in operation are on
Page 2.
MOVIE CLIPS ON PAGE 2
Drawing Set Revision History
29/9/11 - Sheet S001-2 raised to R2 - corrected item 2
(front plate) width.
19/9/11 - Sheet A004-1 raised to R2 - corrected item 24
(belt) length.
© This site is
copyrighted, If you'd like more information or have any
comments please contact me at