3 Degree of Freedom Motion Cue and
Electric Motor Servo Drive Software
UPDATE Sept 2014: A beta driver
version for the racing car sim rFactor is now available -
See the online guide
for download and details.
UPDATE Jan 2014: V2.80 adds an
interface for
Dimension Engineering's Kangaroo motion control modules.
See Section 18 of the
on-line user guide for more detail....
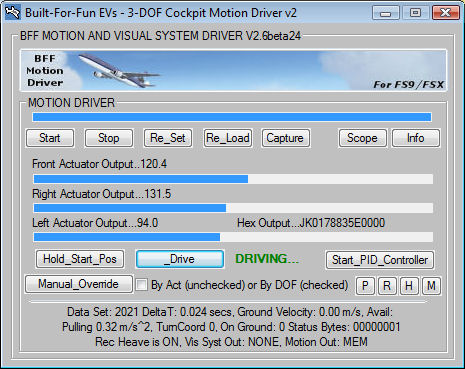
The Motion Drive Software is
a key part of any motion platform system. It handles
the real-time extraction of flight data from the flight
simulator and the
calculation of motion cues for the platform for export
to the Signal Processor Unit or other external control
hardware. The primary output of the motion software is
position demand cues for the platform. These position demand
cues are then used
as inputs to position-feedback (servo) control software/hardware to
drive the platform movements. BFF PID Servo Control software
is included which can be used with
control system hardware available on the site to
implement a DIY closed loop servo control system.
V2 of the motion drive software for MS FS9/X/Lockheed
Martin® Prepar3D®,
X-Plane, Condor and Falcon F4-AF
is available and includes a number of additional
features including direct cue output to
Galil
motion controllers, an
articulated projector motion drive output, LAN
operation, manual override for platform setup, virtual
oscilloscope and several
others. The full software package includes the BFF Motion
Driver, BFF PID Servo Controller, configuration set up
programs for uncoupled DOF and 3-point support type
platforms and the BFF Bridge application for use over your
LAN.
FEATURES:
Low
Cost for DIY'ers
Versions for
FS9/FSX/Lockheed Martin® Prepar3D®, X-Plane 8.6 to 10.0, Falcon F4
and Condor Soaring. Plus beta version for rFactor.
Motion Cue outputs for 2 and 3 DOF platforms with independent DOF actuation and for 3
point support platforms.
LAN operation.
V2 includes the Articulated Projector Drive
for added motion immersion in DIY set ups.
Alternative data output modes - Binary, HEX2 for
general use and Shared Memory or use with the
64SPU-1 SPU and for direct inter-process
data transfer to other applications.
Direct output to Dyadic SCN5 actuators.
Direct output to
Galil
motion controllers with Position Tracking motion modes - see
User Manual).
V2.80 (selected versions) adds direct output to
Dimension Engineering Kangaroo control modules.
Included
PID Servo Drive Control
software for DIY electric motor drive control.
Highly configurable cue
settings with separate set-up programs and multiple file
saves.
In-program cue settings for faster cue tuning.
Built-in
Virtual Oscilloscope for live motion cue tracing.
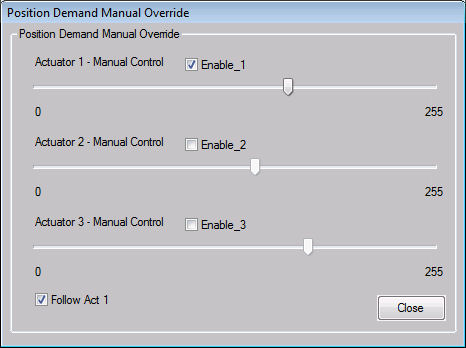
Manual Override of position demand outputs for
platform set up activities.
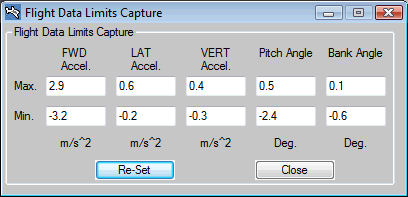
Live Capture of aircraft accelerations and
angles to assist with cue configuration activities.
Cue data text output for
charting & inspection.
Selected aircraft status
indicator outputs in HEX2 output mode.
Support for
US Digital MA3 position encoders
and for 12bit potentiometer position feedback.
Motor Speed Controller real-time condition
monitoring (when used with the 64SPU-1 SPU
and MD03 motor controllers).
Hot key and hot button feature for drive
engage/disengage.
ONLINE USER
MANUAL
The motion drive software for
MS FS9/FSX/Lockheed Martin® Prepar3D® uses Pete Dowson's FSUIPC to obtain motion data
from the flight sim and gives data update rates of about
25/33 sets per second (system dependent). With v2.6 this
can be adjusted upwards and is limited by FSX frame rates
and your PC performance. The X-Plane and Condor versions
utilize the sims' built-in data output facilities and communicates
with the simulator using UDP protocols and like the V2 MSFS
version can be run on the
same machine as the sim or over a network.
Some of the software's features are......
|

In-program
cue settings for easier system tuning. |
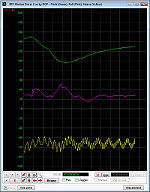
Built-in
virtual oscilloscope for live cue tracing.
(Courtesy
M.Bernstein -
www.oscilloscope-lib.com/) |
|
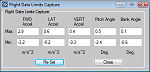
Data "Capture" feature
to quantify flight accelerations and angles
during important motion events. |

Manual control
of outputs for platform setup activities |
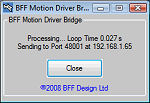
LAN Data
Bridge for networked operation to keep the CPU
load down on the sim PC |

Articulated
Projector Drive - to add motion immersion
effects to your set up |
|
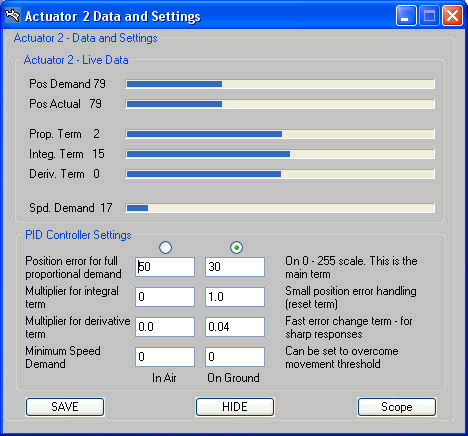
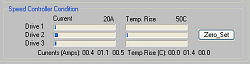 ...and
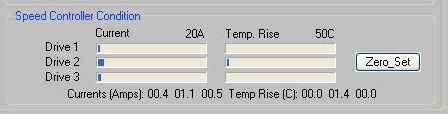
in the PID Servo Controller - REAL-TIME
MD03 speed controller condition monitoring -
live feedback of your speed controller current
draw and temperature rise - to keep an eye on
your drive system loading.....see the
64SPU-1 SPU ...and
in the PID Servo Controller - REAL-TIME
MD03 speed controller condition monitoring -
live feedback of your speed controller current
draw and temperature rise - to keep an eye on
your drive system loading.....see the
64SPU-1 SPU |
The V2 drivers come with PID Servo Controller software
which performs control loop servo calculations on the
PC that were previously done by the external control
hardware. This substantially simplifies the external
hardware and offers better control algorithms - see the
Signal Processor Unit design here.
The PID controller only works with the SPU hardware
described on this site - for your own hardware use the
direct position demand output from the Motion Driver.
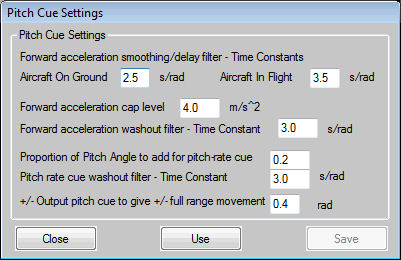
Motion Cues
The
movement cues are derived from aircraft accelerations and
orientation. I've used classical filtering and washout
algorithms (cf this
Masters Thesis) to develop force cues. Platform pitch angle is derived
from the instantaneous aircraft fore/aft acceleration and
pitch angle with an element of pitch-rate cuing. Roll angle is derived from sideways
acceleration with an element of roll angle to simulate felt
roll rates. There is therefore a strong element of "gravity
alignment" or "tilt coordination" in the pitch and roll DOF's
to simulate the force effects of acceleration and
orientation, although the strengths of the effects can be
user adjusted.
The heave cue is the most complex and is derived
from aircraft heave acceleration. The limited cockpit heave
movement makes heave motion cueing less than
straightforward. Cueing sustained acceleration events isn't
possible with a short stroke length so only the on-set and off-set of these events can
really be cued and making these short acceleration
"impulses" feel right with the simulator visuals and control events is
quite challenging. This is done by noise filtering, limiting
and washing-out the aircraft acceleration to catch only the
start and end of sustained acceleration events. The heave
motion is further
complicated by the general behaviour of the type of aircraft
being simulated. For example light GA type aircraft flown in
a controlled way don't see levels of acceleration that are
all that high - indeed any flight turbulence there may be
can quite easily swamp the manoeuvring G's. So an effective
use of the heave movement in the motion cockpit seems to be
to simulate ongoing heave activity due to flight turbulence
and also to simulate what can be quite active movements
during the higher speed runway operations.
There is a
detailed User Manual which describes the program setup and
use - see the user
manual. From this you can see that many of the parameters
used to control the motion cues are adjustable by the user.
Another
issue related to heave motion cueing is that quite often FS9/X reports flat-calm flying conditions and
unrealistic zero heave movement even in light aircraft which
you might expect to bob about quite a bit.
Similarly on smooth runway types there is very little heave
movement reported even though take off and landing runway
activity should be quite dynamic. To make these events more
realistic I've built-in a heave motion recording facility
which allows you to record a 2 minute long spell of heave
activity from FS9/X for the aircraft normally used. This can be used to record straight and
level flight motion with no effects present other than light
or medium turbulence effects and can later be switched on
or off in flight to suit personal preference when the actual
flight conditions seem too flat.
Dynamic runway effects can also be added by
the motion driver - for details see the User Manual. The
need for these added effects in
X-Plane is less pressing as its flight model produces much more movement during normal flight.
© This site is
copyrighted, If you'd like more information or have any
comments please contact me at