CL Controller App - 3rd Party Software
Control
|
BFF CL Controller
software
The software is now
included in the main CL software download zip here:
BFF CL Software |
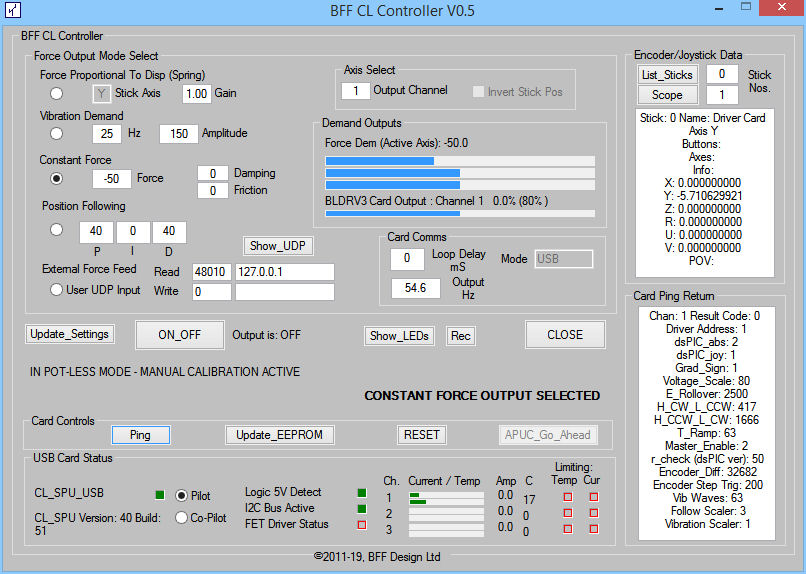
CL Controller App
The new CL Controller App provides
test loading functions for the setup and commissioning stage
of the CL drive build (similar to the existing Driver Test
App).
CL Controller PDF User Guide
It also provides a new loading data input
mode which allows 3rd party software to drive and control
the CL system via the
CL_SPU_USB and
BLDRV3 driver cards.
The new data input is via UDP. For further
details of the UDP data formats see the CL Software
online
user guide here...
The external force feed mode allows 3rd party
software to be developed either as an alternative to the
main Control Loader software
or to provide additional specialised force-feedback axes
such as helicopter collective, heavy jet steering tiller or
brakes. To do this the CL Controller can drive an additional
CL_SPU_USB card with up to three BLDRV3 motor driver cards.
By way of example a simple Steering Tiller
"feeder" app is included in the CL Controller download zip.
It runs with FSX/P3D or X-Plane.
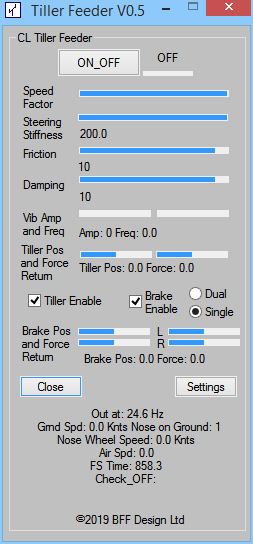
Tiller / Toe Brake Feeder App
The Tiller Feeder App generates simple tiller
axis loading and provides an interesting substitute for a
passive spring centred tiller. It also now provides loading
for Toe Brakes (requires recent BLDRV3 card firmware).
In its simple model the generated steering
force varies inversely with aircraft taxiing speed; so the
steering feel gets heavier as the speed reduces. Maximum and
minimum stiffness, friction and damping levels can be set.
Some runway vibration effects are also generated by the app.
The toe Brakes are modelled as a simple
spring response with damping and friction. Return to endstop
mode can be configured in recent BLDRV3 cards as can a 2
stage spring response if required. These modes are a better
match for brake pedals than the normal return to mid loading
used on most control axes.
The feeder app feeds tiller loading data via the CL
Controller to axis 1 on the CL drive connected to the CL
Controller. Toe Brake loading is fed to axes 2 & 3. This
drive must be in addition to any CL cards already
driven by the main BFF CL Software
if it is present.
FSUIPC is used for comms with FSX (or derived
sims). For use with X-Plane XPUIPC is required.
If you can't
get to the XPUIPC website here's DropBox links for XPUIPC -
V1.9 and
V2.0
|
UDP Data
Display |
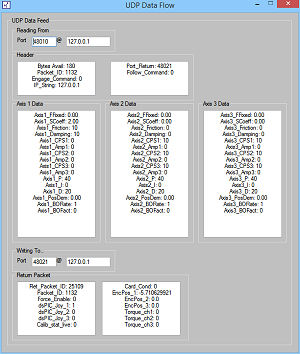
UDP Data Display
To assist software development the CL
Controller provides a UDP data inspection window which
displays the UDP data received by the app and also displays
the UDP return data packets sent back by the CL Controller
to the 3rd Party software.
This allows UDP data flow to be confirmed and
the loading components inspected before they are
sent on to the live motor drives.
Data is displayed for each of up to 3 axes.
The return data exported by the CL Controller
includes data on axis positions, torques, card and loading
status. The axis positions can be used by the feeder app to
further control axis positions in the sim software.
© This site is
copyrighted, If you'd like more information or have any
comments please contact me at